Problem
InSpatio-WorldFM addresses a core weakness of video world models: They are often too slow for real-time interaction and too unstable across viewpoint changes.
The paper proposes a real-time generative frame model that aims to support interactive spatial exploration while maintaining multi-view consistency.
Model Details
InSpatio-WorldFM is a conditional novel-view synthesis model built around a Diffusion Transformer (DiT). Instead of autoregressively generating a video, it takes:
- a reference image $x_{ref}$ (implicit scene memory)
- noisy target latents $z_t$
- point cloud rendering $\hat{x}_{tgt}$ (explicit 3D anchor)
Reference pose $π_{ref}$ and target pose $π_{tgt}$ are also injected as control signals. then predicts the target-view image $I_{tgt}$.
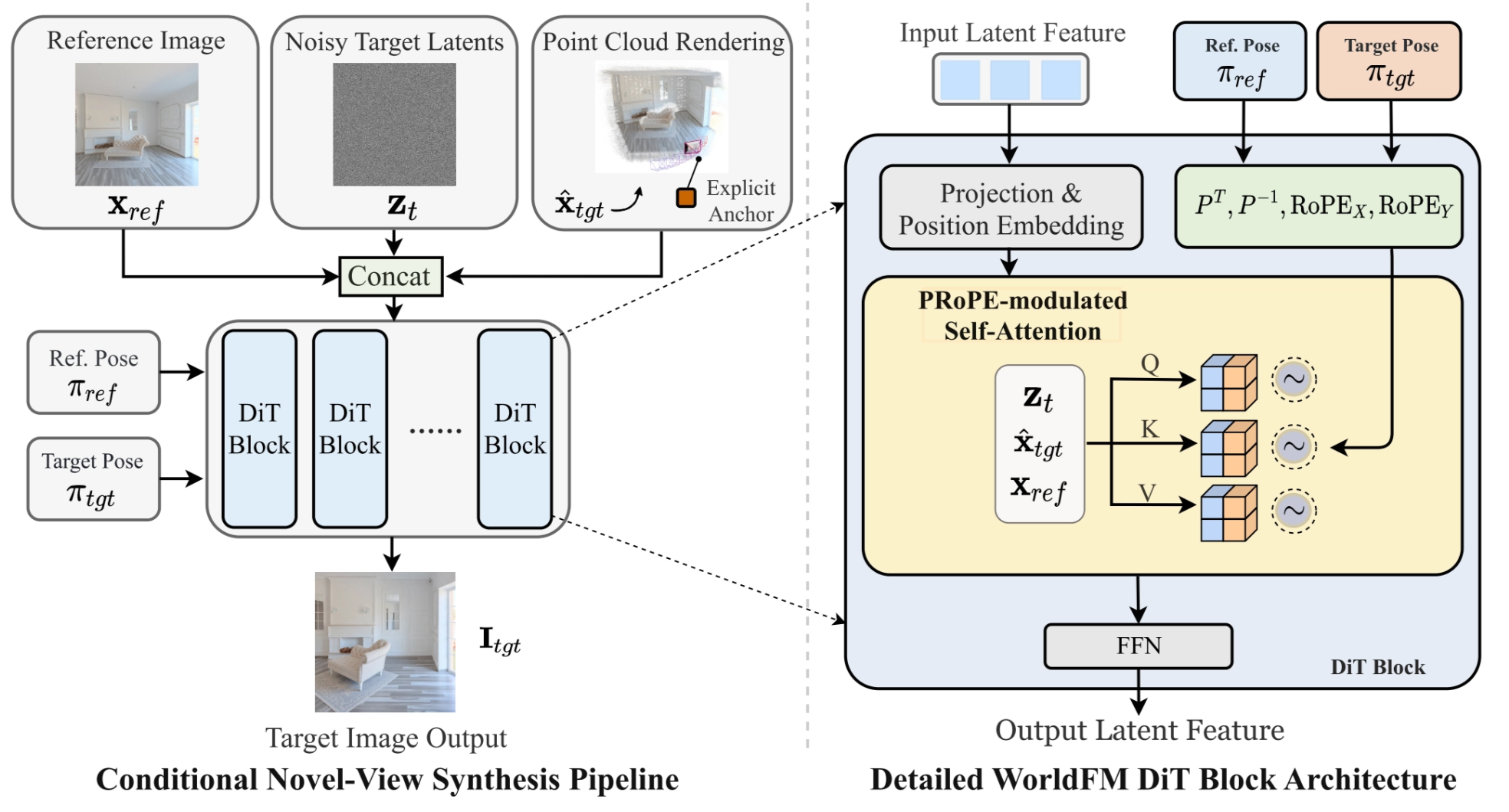
A key idea is to combine explicit 3D structure with learned spatial memory.
The pipeline renders a point cloud from the reference view to the target view, producing a coarse spatial prior $\hat{x}_{tgt}$. This rendered result acts as an explicit 3D anchor, telling the model where scene content should roughly appear after the viewpoint changes. At the same time, the DiT processes the reference image and noisy target latents jointly, allowing the network to maintain an implicit internal memory of scene layout and appearance. Together, these two parts help preserve both global geometry and fine details across views.
Inside each DiT block, the model uses pose-aware conditioning. The paper highlights Projection and Position Embedding together with PRoPE-modulated self-attention, where both the reference pose and target pose are injected into attention through transformation-related embeddings. Intuitively, this lets attention operate not only over visual tokens, but also under the constraint of how the camera moved from the reference view to the target view.
So, in short, the architecture can be understood as:
Training
The model is trained in three stages.
- First, it starts from a pretrained PixArt-α DiT image diffusion model.
- Then, it is adapted into a camera-controlled frame model by adding reference-view conditioning, 3D point-cloud anchors, and spatial memory.
- Finally, the model is distilled with DMD into a few-step generator for real-time use.
For training data, the authors use real videos, captured videos, and synthetic Unreal Engine scenes. From multi-view frames, they estimate camera poses and depth, build a global point cloud, and render it into the target view as an explicit 3D anchor.
Inference
Inference is divided into offline and online stages.
- In the offline stage, a multi-view model builds a global scene representation from input views.
- In the online stage, the real-time frame model takes the scene condition, reference image, target pose, and noisy latent, then directly generates the target-view image.
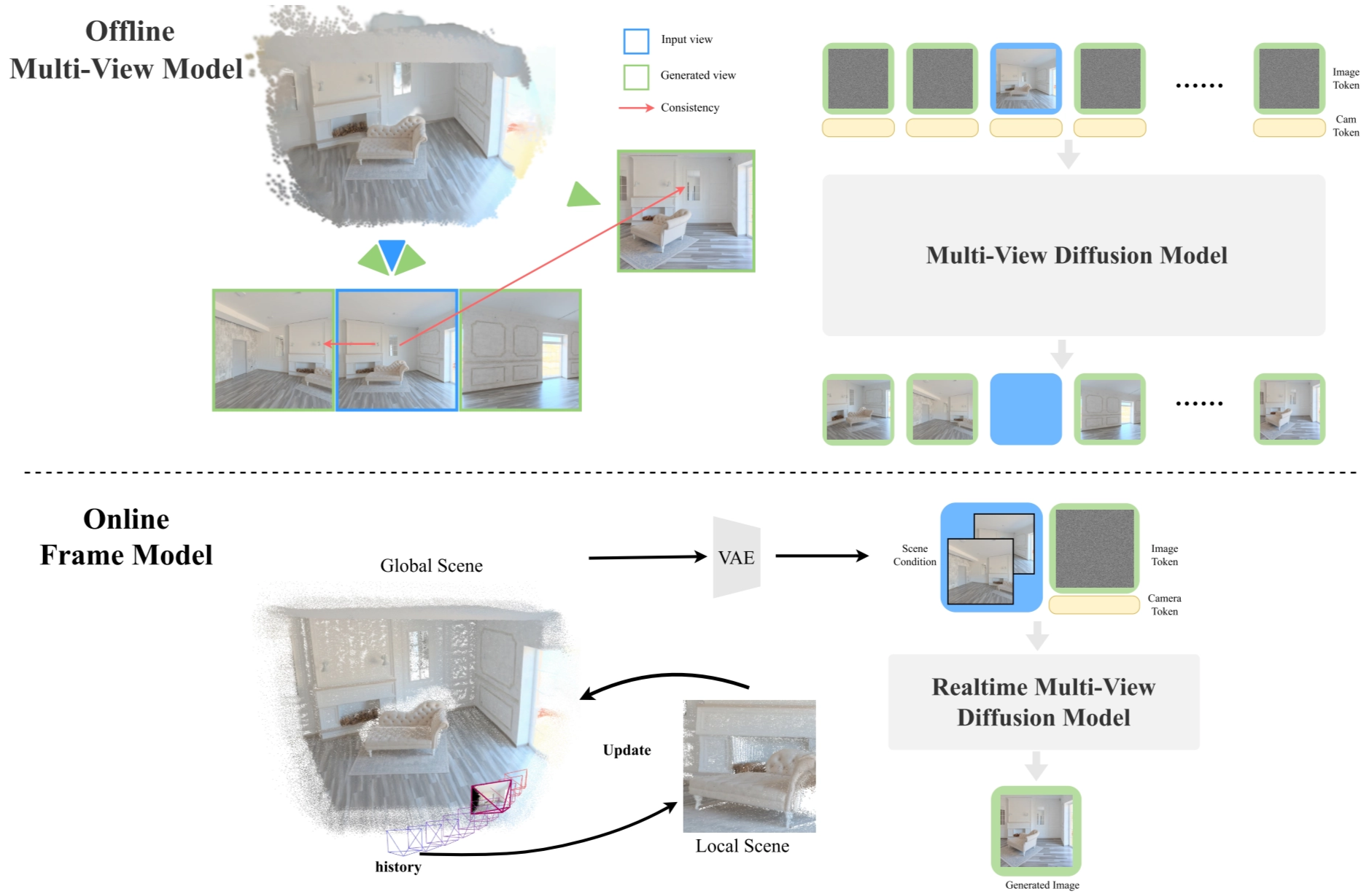
Because the model generates each frame independently instead of sequentially producing a whole video, it achieves low-latency interactive view synthesis. The final distilled version supports real-time multi-view generation while preserving spatial consistency.
Experiments
The experiments show that InSpatio-WorldFM achieves two main goals at the same time: strong multi-view consistency and real-time generation speed. The paper positions this as an advantage over standard video-based world models, which are usually slower because they generate frames sequentially. WorldFM instead generates each target frame independently, making it more suitable for interactive spatial exploration.
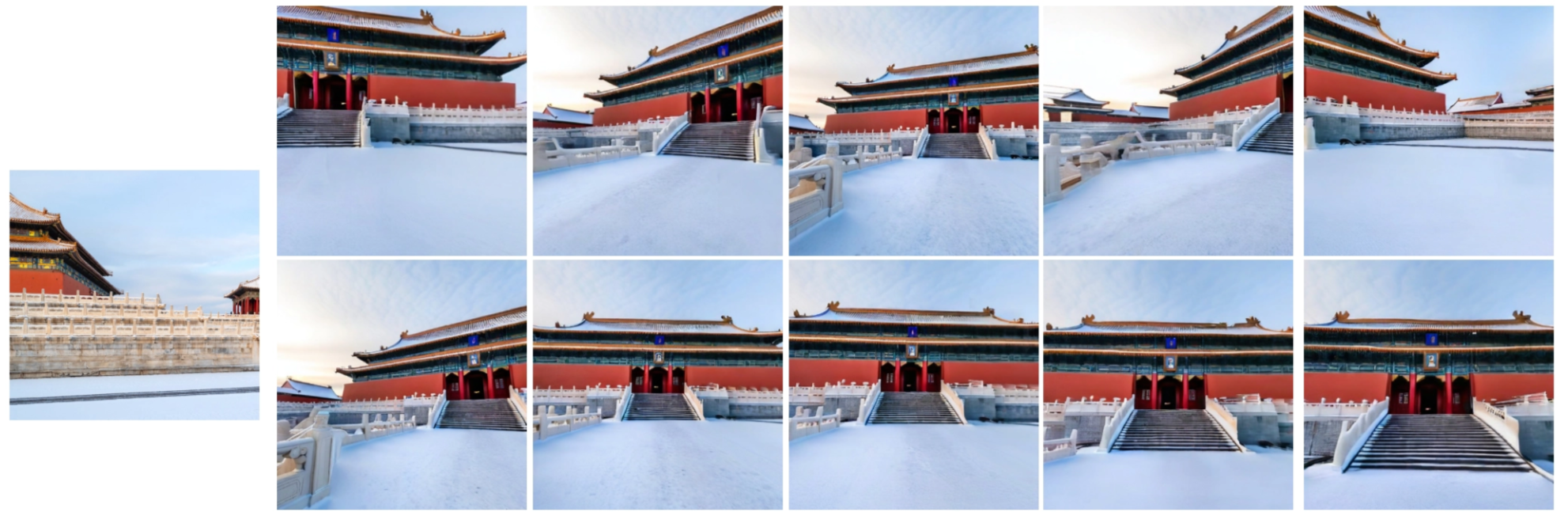
Qualitatively, the model produces stable viewpoint transitions while preserving overall scene geometry and fine visual details. In the following figure, the generated views remain consistent as the camera moves around the scene, showing that the model is not just making plausible images, but maintaining a coherent underlying 3D structure across views.
On the efficiency side, the project reports interactive frame rates on a single RTX 4090, and the paper emphasizes support for consumer-grade GPUs rather than only high-end datacenter hardware. This is an important result because the method is designed not only for visual quality, but also for practical real-time deployment.
Conclusions
InSpatio-WorldFM shows that a frame-based design can support real-time spatial inference with strong view consistency. However, dynamic scene modeling, motion range, and temporal stability are still limited.
Future work will focus on faster inference, better 3D anchors, stronger dynamic-content generation, and larger-scale real-time world modeling.
References
[1] X. Zhang et al., “InSpatio-WorldFM: An Open-Source Real-Time Generative Frame Model,” 2026, arXiv:2603.11911.
[2] InSpatio Team, “InSpatio-WorldFM: An Open-Source Real-Time Generative Frame Model for Spatial Intelligence,” [Online]. Available: https://inspatio.github.io/worldfm (Accessed: Mar. 24, 2026).
[3] InSpatio Team, “inspatio/worldfm,” GitHub, 2026. [Online]. Available: https://github.com/inspatio/worldfm (Accessed: Mar. 24, 2026).
[4] W. Peebles and S. Xie, “Scalable Diffusion Models with Transformers,” 2022, arXiv:2212.09748.
[5] R. Li, B. Yi, J. Liu, H. Gao, Y. Ma, and A. Kanazawa, “Cameras as Relative Positional Encoding,” 2025, arXiv:2507.10496.
[6] J. Chen et al., “PixArt-α: Fast Training of Diffusion Transformer for Photorealistic Text-to-Image Synthesis,” 2023, arXiv:2310.00426.